四元数插值 Interpolating Quaternions
对四元数进行 插值,本质上是在多个 旋转姿态 做 平滑过渡 或 权重混合,四元数插值有两种常见做法
| 方法 | 全称 | 主要特点 | 典型用途 |
|---|
| Slerp | Spherical Linear Interpolation(球面线性插值) | 1. 在四维单位球面上走最短圆弧,角速度恒定。
2. 产生的旋转序列“扭矩最小”(torque-minimal),不会出现忽快忽慢的转动。
3. 计算量稍大(需要三角函数)。
4. 不具备交换律:Slerp(q₀→q₁, t) ≠ Slerp(q₁→q₀, t)。 | 需要高物理正确性和匀速旋转的场景,如刚体动力学、摄像机跟随。 |
| Nlerp | Normalized Linear Interpolation(归一化线性插值) | 1. 先对四元数做线性插值(Lerp),再把结果单位化;计算只用乘加、一次归一化,速度快、代码简单。
2. 插值路径不是严格的球面大圆弧,角速度 不恒定(靠近端点时更慢)。
3. 具备交换律:Nlerp(q₀→q₁, t) = Nlerp(q₁→q₀, 1−t)。
4. 仍然是扭矩最小插值,但精度略逊于 Slerp。 | 角色动画、UI 过渡等对精度要求不高,追求性能的场合。 |
这里所说的 “扭矩最小”(torque-minimal 或 minimum-torque) 是从 “刚体动力学” 角度来评价一条旋转插值曲线的物理性质:在理想均匀刚体、忽略外力的前提下,这条插值轨迹所需的外加扭矩 τ(或其二范数的时间积分)是所有可行路径里最小的
Nlerp 归一化线性插值
对任何 标量 或 向量 做 lerp 线性插值 都是
a+t(b−a),t∈[0,1]
四元数也不例外,只是 a, b 必须保持单位长度,而进行 lerp 之后,长度一般不再等于 1,所以我们可以再最后进行一次 归一化 Normalize,这就是 Nlerp 归一化线性插值
可能不是最短路径
因为 单位四元数 和它的 相反数 −q 在 三维空间 中表示 同一姿态,但却位于 四维超球面 的 对立半球,当我们直接执行 lerp 时,如果起点和终点分属两侧,会沿半个大圆以外的 “长弧” 进行插值,角度将多转 180∘,为了避免这种情况,我们可以用 点乘 判断是否同属一个半球,如果
a⋅b<0
那么说明它们分属 四维超球面 的两侧,我们需要将终点进行 取反
b←−b
典型代码
Quaternion Nlerp(Quaternion start, Quaternion end, float t)
{
if(Dot(start,end) < 0.0f) // ① 取最短弧
end = Negate(end);
Quaternion res = start + (end - start) * t; // ② 线性插值
return Normalize(res); // ③ 单位化
}
Nlerp 非常快速,只有加减乘+一次 normalize
带权混合 Mixing
动画系统常用另一种 等价形式 来表示 lerp 和 Nlerp,即用 权重混合 来把两个(或多个)Pose/骨骼姿态叠加,对于四元数,也就是按 权重 对姿态求平均
mix(a,b; w)=Normalize((1−w)a+wb)
- 去掉 Normalize 就是普通的 lerp 带权混合形式
当然,我们仍然需要用 点乘 判断是否同属一个半球用以取反来保证插值按 最短弧 进行
Quaternion Nlerp(Quaternion start, Quaternion end, float t)
{
if(Dot(start,end) < 0.0f) // ① 取最短弧
end = Negate(end);
Quaternion res = a*(1-t) + b*t; // ② 线性插值
return Normalize(res); // ③ 单位化
}
这在 动画层叠 / additive blending 里特别常用:你可以给若干动作片段各分配 0.3、0.5、0.2…… 的权重,把它们 “加权平均” 后再归一化,得到最终骨骼姿态
Slerp 球面线性插值
我们先来看看 三维向量 的 Slerp,其完全基于 大圆(测地线) 上做等速运动 的 几何约束
首先,若有 夹角 为 θ 的 q0, q1 均是 三维单位球体 上的点,那么它们生成的 二维子空间 P=span{q0, q1} 与 原点 相交于一个 单位圆,整条 最短弧 都落在这个平面里,也就是说我们将问题降维到一个 二维单位圆
我们首先需要构造 正交基,因为 q0, q1 都是 三维单位球体 上的点,所以它们都是 单位向量,那么
e1=q0
而要构造 e2,我们先使用 Gram-Schmidt 正交化 q1−(q1⋅q0)q0,然后再对其执行归一化,也就是除以它的长度 ∥q1−(q1⋅q0)q0∥
e2=∥q1−(q1⋅q0)q0∥q1−(q1⋅q0)q0
我们知道 点乘 可以写为
q1⋅q0=∥q1∥⋅∥q0∥cosθ=cosθ
- q0, q1 都是 单位向量
所以 分子 可以写为
q1−(q1⋅q0)q0=q1−cosθq0
而 分母 也可以进行修改
∥q1−(q1⋅q0)q0∥2∴ ∥q1−(q1⋅q0)q0∥=∥q1∥2+cos2θ∥q0∥2−2cosθ(q1⋅q0)=1+cos2θ−2cos2θ∵∥q1∥2=∥q0∥2=1, q1⋅q0=cosθ=1−cos2θ=sin2θ=sinθ
所以我们得到最终的 正交基
⎩⎨⎧e1=q0e2=sinθq1−cosθ q0⟹P=span{e1, e2}
e1, e2 在平面 P 内 正交归一,因此任何 插值点 都可写成
q(t)=x(t)e1+y(t)e2
从 p0→p1 的 插值点 必须满足以下 约束条件
-
端点条件
q(0)q(1)=q0=e1=q1=cosθe1+sinθe2⟹x(0)=1, y(0)=0⟹x(1)=cosθ, y(1)=sinθ
- q1=cosθe1+sinθe2 是因为
q1⋅e1q1⋅e2=q1⋅q0=cosθ=q1⋅sinθq1−cosθ q0=sinθq1⋅q1−(q1⋅q0)(q1⋅q0)=sinθ1−cos2θ=sinθsin2θ=sinθ
-
保持单位长度
插值向量 的长度需要保持为 1
∥q(t)∥2=x(t)2+y(t)2=1
-
角度线性(匀速)
我们知道 单位向量 u 和 v 的 点乘 与 夹角 关系是
u⋅v=cos[∠(u, v)]
我们还知道 q0 和 q1 的 完整夹角 是 θ,而 插值向量 q(t) 与 初始向量 q0 的 夹角 是 ∠(q0, q(t)),我们希望它随着插值的进行,一路 线性 的增长到 θ,也就是
∠(q0, q(t))=tθ,t∈[0,1]
有了这个结论,再结合 单位向量 的 点乘 与 夹角 关系,可得
q0⋅q(t)=costθ
我们之前还建立了 正交基 e1,e2,并用它表示了 插值向量 q(t),我们知道
e1q(t)=q0=x(t)e1+y(t)e2
所以有
q0⋅q(t)=e1⋅[x(t)e1+y(t)e2]=x(t)e1⋅e1+y(t)e2⋅e1=x(t)⋅1+y(t)⋅0=x(t)
回代,最终得到
x(t)=costθ
由 角度线性 约束,我们已经得到了 x(t),接下来我们只需要结合 保持单位长度 约束就可以得到 y(t)
x(t)2+y(t)2=1⟹y(t)=±1−cos2(tθ)=±sin(tθ)
沿 最短弧 时 y(t)≥0 (与 e2 同向),故取正号,得到
y(t)=sintθ
所以我们得出
q(t)=costθ e1+sintθ e2
然后我们将 e1, e2 展开写回为 q0, q1
q(t)⎩⎨⎧e1=q0e2=sinθq1−cosθ q0=costθ e1+sintθ e2=costθ q0+sintθ sinθq1−cosθ q0=costθ q0+sinθsintθq1−sinθcosθsintθq0=[costθ−sinθcosθsintθ]q0+sinθsintθq1=sinθsinθcostθ−cosθsintθq0+sinθsintθq1
我们可以利用 三角恒等式
sin(A−B)=sinAcosB−cosAsinB
所以我们有
sin(θ−tθ)=sinθcostθ−cosθsintθ
回代,得到
q(t)=sinθsinθcostθ−cosθsintθq0+sinθsintθq1=sinθsin(θ−tθ)q0+sinθsintθq1=sinθsin[(1−t)θ]q0+sinθsintθq1
这正是 正弦权重 版的 Slerp 公式,整条 插值曲线 因此可以视为在以 q0, q1 “按弦长正弦比” 进行的匀速运动,当 θ→0 时,sinθ≈θ,此时公式滑退化为普通 lerp 线性插值 q0+(q1−q0)t
四元数 Slerp
要推导 四元数 q0 到 q1 的 Slerp,核心思想是在 四维单位球 S3 上寻找经过 q0→q1 的最短大圆弧,并要求匀速(角速度恒定)地走这条弧线
单位四元数 对应 三维旋转,其集合构成 三维流形 S3 (半径 1 的 四维超球面),两个 四元数 点 q0, q1∈S3 间的测地线就是穿过两点的 大圆(Great Circle),设
Ω=arccos(q0⋅q1),0<Ω≤π
是两点在 S3 上的 夹角 (用四元数点积即可求得),在大圆坐标系里,想要 匀速 行走意味着 插值点 必须满足
θ(t)=(1−t)0+tΩ=tΩ
即 插值角度 θ(t) 与参数 t 成 线性 关系
根据我们前面的推导,在二维圆上我们有以下 slerp 插值公式
q(t)=sinθsin[(1−t)θ]q0+sinθsintθq1
我们将 p0 和 p1 换成 四元数 q0, q1 就得到
q(t)=sinΩsin[(1−t)Ω]q0+sinΩsintΩq1
四元数 Slerp - 指数形式
我们知道,四元数的相乘表示旋转的叠加,并且我们已知
- 起点姿态 q0
- 终点姿态 q1
我们需要找到一个 “中间旋转” Δ 使得
q0Δ=q1
可得
Δ=q0−1q1=q0∗q1
可以认为我们先用 q0−1 把当前姿态 “复原” 到基准坐标,再用 q1 把它转到目标姿态,整个组合就等价于一次旋转 Δ
- 注意,Δ 是 “姿态到姿态” 的 差旋转 输入/输出都是完整的 四元数,包含 朝向 + 自旋,而我们前面章节介绍的,输入 from 向量 和 to 向量 来构造 from-to 四元数 是 “方向到方向” 的最短旋转,输入仅仅是两个 3D 向量,输出一个把第一个向量转到第二支向量的 四元数,不含轴向自旋
- 旋转差 3 DoF 自由度:Δ=q0−1q1 完整 SO(3) 旋转;既包含 “把坐标轴指向哪儿”,也包含 “绕该方向自旋了多少”
- from-to 2 DoF 自由度:只能把一根方向矢量对齐到另一根;无法决定 绕该方向自旋(roll)
由于 Δ 也是表示旋转的 单位四元数,所以我们可以将它写成 轴-角 表示以及等价的 指数表示
Δ=(cos2Ω, n^sin2Ω)=en^2Ω
如此一来,我们执行插值将会变的容易,我们可以取 对数 以后对角度按 t 进行 线性插值
logΔ=n^2Ω⟹tlogΔ=n^2tΩ
如果我们再对左右取 指数,可得
etlogΔ=en^2tΩ=(cos2tΩ, n^sin2tΩ)=(en^2Ω)t=Δt
也就是说,要对 Δ 进行 t∈[0,1] 且保持旋转 轴 不变,仅对 角度 进行 线性插值,我们只需要对原四元数 Δ 作 实数幂 操作 Δt,所以 四元数幂 的实现是
Quaternion Pow(Quaternion q, float t)
{
//---------------------------------------
// 0) 若 q 不是严格单位四元数,先归一化
//---------------------------------------
q.normalize(); // 可省略,但最好保守处理
//---------------------------------------
// 1) 提取半角 θ/2
//---------------------------------------
float cosHalf = q.w; // w = cos(θ/2)
// 若 |cosHalf| ≈ 1 → 角度极小,需要特殊处理
if (fabs(cosHalf) > 0.9999f)
{
// 与 Lerp 近似:q^t ≈ (1-t) + t*q
return Quaternion::Lerp(Quaternion::Identity(), q, t).normalized();
}
float halfAngle = acos(cosHalf); // θ/2 ∈ (0,π)
//---------------------------------------
// 2) 求旋转轴 n̂
//---------------------------------------
float sinHalf = sqrtf(1.0f - cosHalf * cosHalf); // = |v|, > 0 因为上面排除了极小角
Vector3 axis(q.x / sinHalf, q.y / sinHalf, q.z / sinHalf); // 已单位化
//---------------------------------------
// 3) 把角度乘 t,再算新的 sin/cos
//---------------------------------------
float newHalf = t * halfAngle; // = tθ/2
float newCos = cosf(newHalf);
float newSin = sinf(newHalf);
//---------------------------------------
// 4) 组合回四元数
//---------------------------------------
return Quaternion(axis * newSin, newCos); // (x,y,z,w)
}
- 若平台有
sincosf() 或 SIMD sin_cos(), 可以一次性同时取 sin 和 cos,更省性能
最终,我们可以得到四元数 Slerp 的 指数幂形式
q(t)=q0Δt=q0(q0−1q1)t
它与 三角函数 写法完全等价,只需将 (q0−1q1)t 展开成 (cos2Ω, n^sin2Ω) 并用 倍角公式 即可,但是 指数 写法更紧凑,且与实现 Pow() 函数(幂运算)天然耦合
struct Quaternion { float x, y, z, w; /* …ctor & ops… */ };
Quaternion Slerp(const Quaternion& a_, const Quaternion& b_, float t)
{
Quaternion a = a_, b = b_;
// ① 最短弧:同半球
if (Dot(a, b) < 0.0f)
b = -b;
// ② 差旋转
Quaternion delta = b * Inverse(a);
// ④ 小角退化(利用 delta.w ≈ cos(θ/2))
if (fabs(delta.w) > 0.9999f)
return Normalize(Lerp(a, b, t)); // Nlerp 近似
// ③ Δ^t —— 直接用四元数 Pow() 函数
Quaternion deltaPow = Pow(delta, t);
// ⑤ 左乘起点
return deltaPow * a;
}
以上是 指数形式 实现的 四元数 Slerp,但是不管是 指数形式 还是 三角函数形式,都无法避免 acosf,所以四元数的 Slerp 存在一定的性能消耗
四元数 Slerp vs 向量 Slerp
| 维度 | 四元数 Slerp | 三维向量 Slerp |
|---|
| 插值对象 | 单位四元数 q∈S3(表示完整姿态/旋转) | 单位向量 v∈S2(仅表示方向;不含绕该方向的自旋) |
| 几何空间 | 四维单位球面 S3 上的最短大圆弧 | 三维单位球面 S2 上的最短大圆弧 |
| “距离”定义 | 李群 SO(3) 的测地距离:Ω=2arccos(q0⋅q1) | 球面夹角:θ=arccos(v0⋅v1) |
| 公式形态 | q(t)=q0(q0−1q1)t
或 q(t)=sinΩsin((1−t)Ω)q0+sinΩsin(tΩ)q1 | v(t)=sinθsin((1−t)θ)v0+sinθsin(tθ)v1 |
| 是否“扭矩最小 / 匀速” | 是。角速度恒定、扭矩最小 | 是。角速度恒定(但只对方向向量有意义) |
| 双覆盖问题 | q 与 −q 表示同一旋转;如果需要最短路径,则插值前必须先把终点翻到同一半球 | v 与 −v 表示相反方向,语义不同,不做翻转 |
| 可组合性 | 闭合于乘法:q(t1)q(t2)=q(t1+t2)(当基准相同) | 不具备群结构,难以“相乘”组合 |
| 应用场景 | 1. 刚体姿态、关节骨骼动画
2. 摄像机朝向 + roll
3. 任意两旋转的自然过渡 | 1. 纯方向插值(朝向一束射线、法线指向)
2. 只关心“看向哪里”,不关心自转 |
| 额外自由度 | 包含“绕朝向轴”的自旋;Slerp 会正确插值该自旋 | 没有轴向转动概念 |
| 实现成本 | 需要四元数乘法、逆、幂;稍重 | 只需三维向量运算;更轻 |
四元数保存了 “绕方向自转” 的信息;为了保持 匀速自旋,就得处理 q0−1q1 再做幂运算,而向量只关心方向角度,公式更简单,如果只旋转镜头指向,而不想处理 roll,向量 Slerp 就够;要连同 roll 一起平滑过渡,必须用 四元数 Slerp
双覆盖问题
在上面的分析中我们提到,在两个四元数之间进行插值时,插值可以采用两者之间最短或最长的圆弧,因为这两个四元数都代表 同一姿态
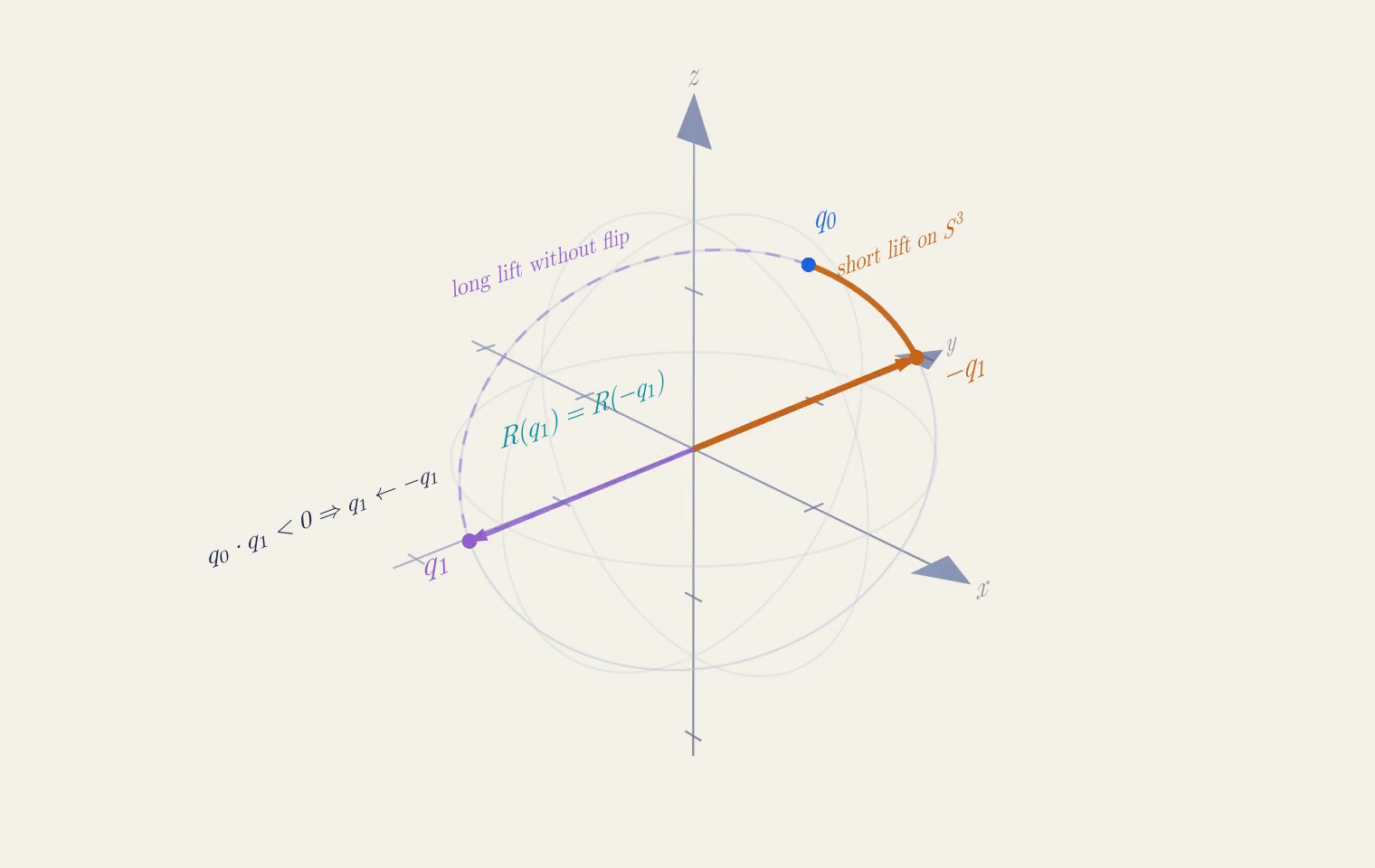
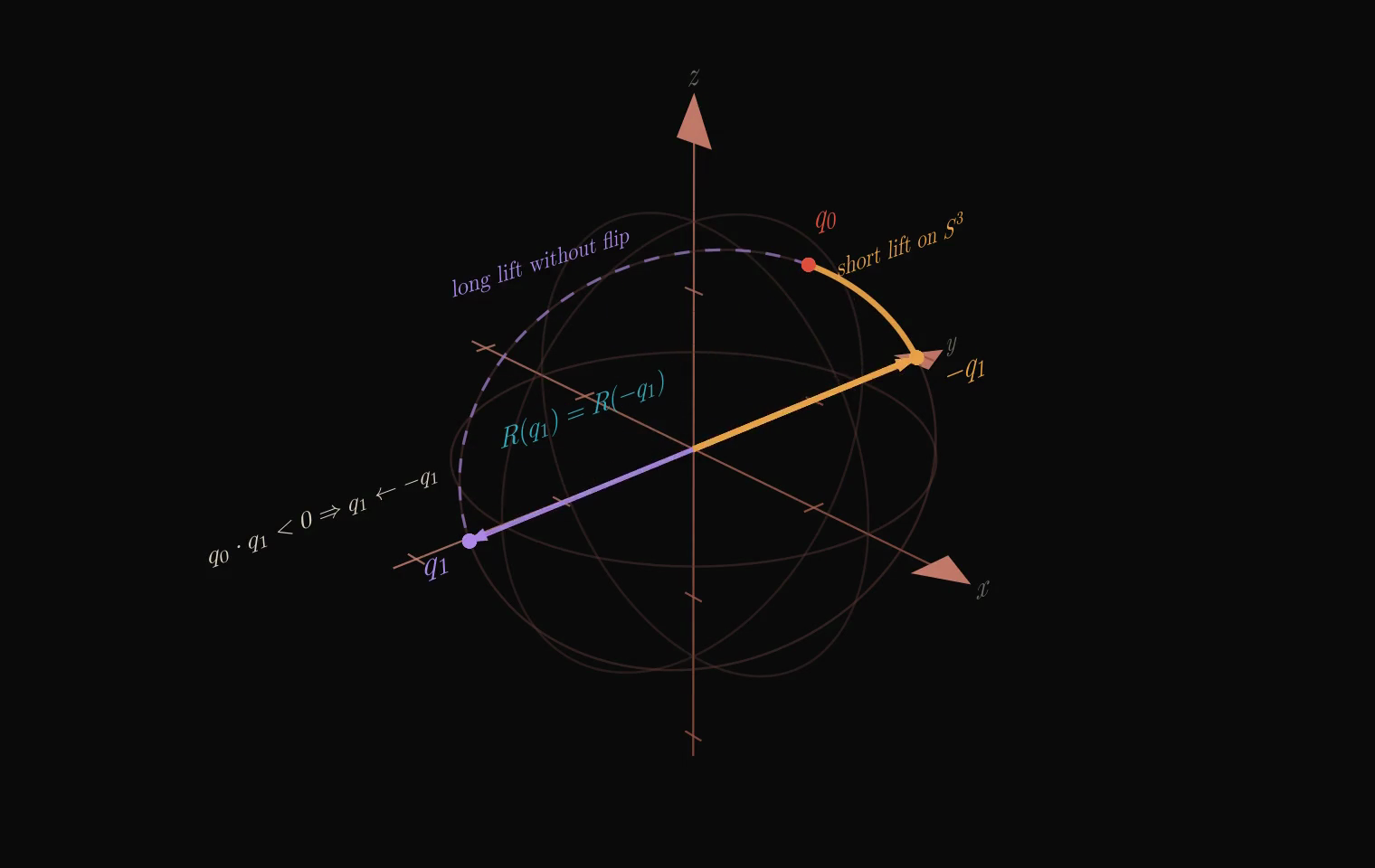 同一姿态可由 q 与 -q 表示;实心箭头展示翻转后的最短 lift,紫色虚影展示未翻转时从 q₀ 走向 q₁ 的长路径。
同一姿态可由 q 与 -q 表示;实心箭头展示翻转后的最短 lift,紫色虚影展示未翻转时从 q₀ 走向 q₁ 的长路径。
我们一般会想让插值沿着 最短路径 进行,如果你曾经见过游戏中角色的弯曲错误,但动作却正确,那么很可能是没有沿着 最短路径 执行插值,我们在上面的代码中已经加入了 半球检测
// ① 最短弧:同半球
if (Dot(a, b) < 0.0f)
b = -b;